এমপিইউ -6050 এর সাথে পারফরম্যান্স অনুকূলকরণ: সেটআপ, ক্রমাঙ্কন এবং অ্যাপ্লিকেশনগুলি
2024-04-25
9230
এমপিইউ -6050 বিশ্বের প্রথম সংহত 6-অক্ষ মোশন প্রসেসিং উপাদান, যা একটি 3-অক্ষ জাইরোস্কোপ, 3-অক্ষের অ্যাক্সিলোমিটার এবং একটি স্কেলেবল ডিজিটাল মোশন প্রসেসর (ডিএমপি) সংহত করে।এটি ব্যবহারের উদ্দেশ্য হ'ল এক্স, ওয়াই এবং জেড অক্ষগুলিতে পরিমাপ করা (যেমন একটি কোয়াডকপ্টার, একটি ভারসাম্যপূর্ণ গাড়ি), অর্থাৎ পিচ কোণ, রোল কোণ এবং ইয়াও কোণে পরিমাপের জন্য অবজেক্টের প্রবণতা কোণটি অর্জন করা।আমরা আই 2 সি ইন্টারফেসের মাধ্যমে এমপিইউ -6050 (থ্রি-অক্ষের ত্বরণ বিজ্ঞাপনের মান এবং ত্রি-অক্ষের কৌণিক বেগের বিজ্ঞাপনের মান) এর ছয়টি ডেটা পড়ি।ভঙ্গি ফিউশন প্রসেসিংয়ের পরে, পিচ, রোল এবং ইয়াও কোণগুলি গণনা করা যায়।পরিমাপের মানগুলির জন্য একটি দিকনির্দেশক রেফারেন্স হিসাবে, সেন্সর সমন্বিত দিকের সংজ্ঞাটি নীচের চিত্রটিতে প্রদর্শিত হয়েছে, যা ডান-হাতের সমন্বয় ব্যবস্থার নীতি অনুসরণ করে (এটি, ডান থাম্বটি x- এর ইতিবাচক দিকের দিকে নির্দেশ করেঅক্ষ, সূচক আঙুলটি ওয়াই-অক্ষের ইতিবাচক দিকের দিকে নির্দেশ করে এবং মাঝের আঙুলটি জেড-অক্ষের ইতিবাচক দিকের দিকে নির্দেশ করে)।
ক্যাটালগ

এর ডেডিকেটেড আই 2 সি সেন্সর বাসের সাথে, এমপিইউ -6050 একটি সম্পূর্ণ 9-অক্ষ মোশনফিউশন ™ আউটপুট সরবরাহ করে একটি বাহ্যিক 3-অক্ষ কম্পাস থেকে সরাসরি ইনপুট পেতে সক্ষম।এটি সম্মিলিত জাইরোস্কোপ এবং এক্সিলারেটর টাইমলাইনের মধ্যে তাত্পর্য সমস্যা দূর করে এবং বহু-উপাদানগুলির সমাধানগুলির তুলনায় প্যাকেজিংয়ের স্থানকে উল্লেখযোগ্যভাবে হ্রাস করে।যখন তিন-অক্ষের চৌম্বকীয়তার সাথে সংযুক্ত থাকে, এমপিইউ -60x0 তার মূল আই 2 সি বা এসপিআই পোর্টে পূর্ণ 9-অক্ষ মোশন ফিউশন আউটপুট সরবরাহ করতে সক্ষম (নোট করুন যে এসপিআই পোর্টটি কেবল এমপিইউ -6000 এ উপলব্ধ)।
বিকল্প এবং সমতুল্য
এমপিইউ -6050 এর প্রস্তুতকারক
এমপিইউ -6050 এর প্রস্তুতকারক টিডিকে।টিডিকে দুই প্রতিষ্ঠাতা ড। যোগোরো কাতো এবং টেকি টেকি, টোকিওতে ফেরাইট আবিষ্কার করেছিলেন, তারা টোকিও ডেনকিকাগাকু কোগিও কে.কে.1935 সালে একটি গ্লোবাল ইলেকট্রনিক্স শিল্প ব্র্যান্ড হিসাবে, টিডিকে সর্বদা বৈদ্যুতিন কাঁচামাল এবং বৈদ্যুতিন উপাদানগুলির ক্ষেত্রে একটি প্রভাবশালী অবস্থান বজায় রেখেছে।টিডিকে-র বিস্তৃত এবং উদ্ভাবন-চালিত পণ্য পোর্টফোলিওতে প্যাসিভ উপাদানগুলি যেমন সিরামিক ক্যাপাসিটার, অ্যালুমিনিয়াম ইলেক্ট্রোলাইটিক ক্যাপাসিটার, ফিল্ম ক্যাপাসিটার, চৌম্বকীয় পণ্য, উচ্চ-ফ্রিকোয়েন্সি উপাদান, পাইজোইলেকট্রিক এবং সুরক্ষা ডিভাইসগুলির পাশাপাশি সেন্সর এবং সেন্সর সিস্টেমগুলি (যেমন তাপমাত্রা এবং চাপ হিসাবে, যেমন তাপমাত্রা এবং চাপ,চৌম্বকীয় এবং এমইএমএস সেন্সর) ইত্যাদি ইত্যাদি, টিডিকে বিদ্যুৎ সরবরাহ এবং শক্তি ডিভাইস, চৌম্বকীয় মাথা এবং অন্যান্য পণ্য সরবরাহ করে।এর পণ্য ব্র্যান্ডগুলির মধ্যে টিডিকে, এপিসোস, ইনভেনসেন্স, মাইক্রোনাস, ট্রোনিকস এবং টিডিকে-ল্যাম্বদা অন্তর্ভুক্ত রয়েছে।
এমপিইউ -6050 এর অভ্যন্তরীণ ব্লক ডায়াগ্রাম
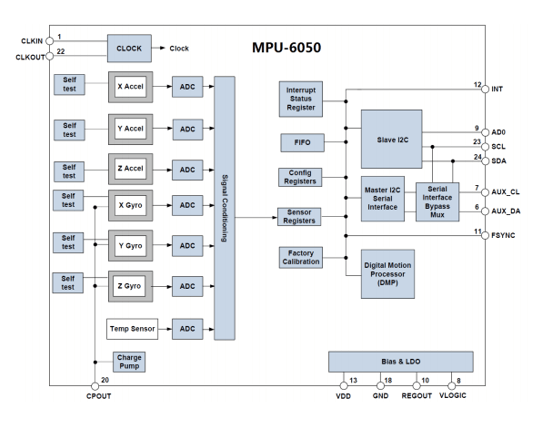
এর মধ্যে, এসসিএল এবং এসডিএ হ'ল আইআইসি ইন্টারফেসগুলি এমসিইউতে সংযুক্ত এবং এমসিইউ এই আইআইসি ইন্টারফেসের মাধ্যমে এমপিইউ -6050 নিয়ন্ত্রণ করে।এছাড়াও একটি আইআইসি ইন্টারফেস রয়েছে, যথা AUX_CL এবং AUX_DA।এই ইন্টারফেসটি বাহ্যিক স্লেভ ডিভাইসগুলি যেমন চৌম্বকীয় সেন্সরগুলির মতো নয়টি অক্ষ সেন্সর গঠনের জন্য ব্যবহার করা যেতে পারে।ভ্লোগিক হ'ল আইও পোর্ট ভোল্টেজ।এই পিনটি সর্বনিম্ন 1.8V সমর্থন করতে পারে।আমরা সাধারণত এটি সরাসরি ভিডিডির সাথে সংযুক্ত করি।AD0 হ'ল স্লেভ আইআইসি ইন্টারফেসের ঠিকানা নিয়ন্ত্রণ পিন (এমসিইউতে সংযুক্ত)।এই পিনটি আইআইসি ঠিকানার সর্বনিম্ন বিট নিয়ন্ত্রণ করে।যদি এটি জিএনডির সাথে সংযুক্ত থাকে তবে এমপিইউ -6050 এর আইআইসি ঠিকানা 0x68;যদি এটি ভিডিডির সাথে সংযুক্ত থাকে তবে এটি 0x69।দয়া করে মনে রাখবেন যে এখানে ঠিকানাটিতে ডেটা ট্রান্সমিশনের সর্বনিম্ন বিট অন্তর্ভুক্ত নয় (সর্বনিম্ন বিটটি পঠন এবং লেখার অপারেশনগুলির প্রতিনিধিত্ব করতে ব্যবহৃত হয়)।Mwbalancestc15 এ, AD0 GND এর সাথে সংযুক্ত, সুতরাং এমপিইউ -6050 এর আইআইসি ঠিকানা 0x68 (সর্বনিম্ন বিট বাদে)।
আইআইসি ইন্টারফেসটি আরম্ভ করুন
এমপিইউ -6050 এসটিসি 15 এর সাথে যোগাযোগের জন্য আইআইসি ব্যবহার করে, সুতরাং আমাদের প্রথমে এমপিইউ -6050 এর সাথে সংযুক্ত এসডিএ এবং এসসিএল ডেটা লাইনগুলি শুরু করতে হবে।
এমপিইউ -6050 রিসেট করুন
এই পদক্ষেপটি এমপিইউ -6050 এর মধ্যে সমস্ত রেজিস্টারকে তাদের ডিফল্ট মানগুলিতে পুনরুদ্ধার করে, যা পাওয়ার ম্যানেজমেন্ট রেজিস্টার 1 (0x6 বি) এর 1 থেকে বিট 7 লিখে অর্জন করা হয়।পুনরায় সেট করার পরে, পাওয়ার ম্যানেজমেন্ট রেজিস্টার 1 ডিফল্ট মান (0x40) এ পুনরুদ্ধার করা হবে এবং এই রেজিস্টারটি এমপিইউ -6050 জাগ্রত করতে এবং এটিকে স্বাভাবিক কার্যকারী অবস্থায় রাখতে অবশ্যই 0x00 এ সেট করতে হবে।
কৌণিক বেগ সেন্সর (GYRO) এবং ত্বরণ সেন্সরটির পূর্ণ-স্কেল পরিসীমা সেট করুন
এই পদক্ষেপে, আমরা যথাক্রমে জাইরোস্কোপ কনফিগারেশন রেজিস্টার (0x1 বি) এবং এক্সিলারেশন সেন্সর কনফিগারেশন রেজিস্টার (0x1C) এর মাধ্যমে দুটি সেন্সরের পূর্ণ-স্কেল রেঞ্জ (এফএসআর) সেট করি।সাধারণত, আমরা জাইরোস্কোপের পূর্ণ-স্কেল পরিসীমাটি 2000 ডিপিএস এবং অ্যাক্সিলোমিটারের পূর্ণ-স্কেল পরিসীমাটি ± 2g এ সেট করি।
অন্যান্য পরামিতি সেট করুন
এখানে, আমাদের নিম্নলিখিত পরামিতিগুলিও কনফিগার করতে হবে: বাধাগুলি বন্ধ করুন, অক্স আই 2 সি ইন্টারফেসটি অক্ষম করুন, ফিফো অক্ষম করুন, জাইরোস্কোপ স্যাম্পলিং রেট সেট করুন এবং ডিজিটাল লো-পাস ফিল্টার (ডিএলপিএফ) কনফিগার করুন।যেহেতু আমরা এই অধ্যায়ে ডেটা পড়তে বাধা ব্যবহার করি না, তাই বাধা ফাংশনটি বন্ধ করা দরকার।একই সময়ে, যেহেতু আমরা অন্যান্য বাহ্যিক সেন্সরগুলিকে সংযুক্ত করতে অক্স আই 2 সি ইন্টারফেস ব্যবহার করছি না, তাই আমাদের এই ইন্টারফেসটিও বন্ধ করতে হবে।এই ফাংশনগুলি বিঘ্নিত সক্ষম রেজিস্টার (0x38) এবং ব্যবহারকারী নিয়ন্ত্রণ রেজিস্টার (0x6 এ) এর মাধ্যমে নিয়ন্ত্রণ করা যেতে পারে।এমপিইউ -6050 সেন্সর ডেটা সঞ্চয় করতে ফিফো ব্যবহার করতে পারে, তবে আমরা এই অধ্যায়ে এটি ব্যবহার করি নি, সুতরাং সমস্ত ফিফো চ্যানেলগুলি বন্ধ করা দরকার।এটি ফিফো সক্ষম রেজিস্টার (0x23) এর মাধ্যমে নিয়ন্ত্রণ করা যেতে পারে।ডিফল্টরূপে, এই রেজিস্টারের মান 0 (যা ফিফো অক্ষম করা হয়), তাই আমরা সরাসরি ডিফল্ট মানটি ব্যবহার করতে পারি।জাইরোস্কোপের নমুনা হার স্যাম্পলিং রেট ডিভাইডার রেজিস্টার (0x19) দ্বারা নিয়ন্ত্রিত হয়।সাধারণত, আমরা এই স্যাম্পলিং হারকে 50 এ সেট করেছি the ডিজিটাল লো-পাস ফিল্টার (ডিএলপিএফ) এর কনফিগারেশন কনফিগারেশন রেজিস্টার (0x1 এ) এর মাধ্যমে সম্পন্ন হয়েছে।সাধারণভাবে বলতে গেলে, আমরা ডেটা যথার্থতা এবং প্রতিক্রিয়া গতির ভারসাম্য বজায় রাখতে ডিএলপিএফকে অর্ধেক ব্যান্ডউইথ সেট করব।
সিস্টেম ঘড়ির উত্সটি কনফিগার করুন এবং কৌণিক বেগ সেন্সর এবং ত্বরণ সেন্সর সক্ষম করুন
সিস্টেম ঘড়ির উত্সের সেটিংটি পাওয়ার ম্যানেজমেন্ট রেজিস্টার 1 (0x6 বি) এর উপর নির্ভর করে, যেখানে এই নিবন্ধের সর্বনিম্ন তিনটি বিট ঘড়ির উত্সের নির্বাচন নির্ধারণ করে।ডিফল্টরূপে, এই তিনটি বিট 0 এ সেট করা হয়েছে, যার অর্থ সিস্টেমটি ঘড়ির উত্স হিসাবে অভ্যন্তরীণ 8MHz আরসি দোলক ব্যবহার করে।যাইহোক, ঘড়ির নির্ভুলতার উন্নতি করতে, আমরা প্রায়শই এটি 1 এ সেট করি এবং এক্স-অক্ষ জাইরোস্কোপ পিএলএলকে ঘড়ির উত্স হিসাবে নির্বাচন করি।তদতিরিক্ত, কৌণিক বেগ সেন্সর এবং ত্বরণ সেন্সর সক্ষম করাও সূচনা প্রক্রিয়াটির একটি গুরুত্বপূর্ণ পদক্ষেপ।উভয় অপারেশন পাওয়ার ম্যানেজমেন্ট রেজিস্টার 2 (0x6C) এর মাধ্যমে প্রয়োগ করা হয়।সংশ্লিষ্ট সেন্সরটি সক্রিয় করতে কেবল সংশ্লিষ্ট বিটটি 0 এ সেট করুন।উপরের পদক্ষেপগুলি শেষ করার পরে, এমপিইউ -6050 স্বাভাবিক কাজের স্থিতিতে প্রবেশ করতে পারে।যে রেজিস্টারগুলি বিশেষভাবে সেট করা হয় না সেগুলি সিস্টেম দ্বারা ডিফল্ট মানগুলি প্রিসেট গ্রহণ করবে।
এমপিইউ -6050 কীভাবে কাজ করে?
গাইরো সেন্সর
সেন্সরটি ভিতরে একটি গাইরো দিয়ে সজ্জিত, যা জাইরোস্কোপিক প্রভাবের কারণে সর্বদা প্রাথমিক দিকের সমান্তরাল থাকবে।অতএব, আমরা প্রাথমিক দিক থেকে Gyro এর বিচ্যুতি সনাক্ত করে ঘূর্ণনের দিক এবং কোণ গণনা করতে পারি।
অ্যাক্সিলোমিটার সেন্সর
একটি অ্যাক্সিলোমিটার সেন্সর এমন একটি ডিভাইস যা ত্বরণ পরিমাপ করতে পারে এবং এটি পাইজোইলেক্ট্রিক প্রভাবের নীতির ভিত্তিতে কাজ করে।ত্বরণের সময়, সেন্সরটি ভর ব্লকে প্রয়োগ করা জড় শক্তি পরিমাপ করে এবং তারপরে নিউটনের দ্বিতীয় আইন ব্যবহার করে ত্বরণ মান গণনা করে।
ডিজিটাল মোশন প্রসেসর (ডিএমপি)
ডিএমপি হ'ল এমপিইউ 6050 চিপের একটি ডেটা প্রসেসিং মডিউল যা জাইরোস্কোপ এবং অ্যাক্সিলোমিটার সেন্সরগুলির কাছ থেকে ডেটা অর্জন এবং আউটপুট কোয়ার্ট্রনগুলি প্রক্রিয়াজাতকরণের জন্য একটি অন্তর্নির্মিত কালম্যান ফিল্টারিং অ্যালগরিদম রয়েছে।এই বৈশিষ্ট্যটি পেরিফেরিয়াল মাইক্রোপ্রসেসরের কাজের চাপকে ব্যাপকভাবে হ্রাস করে এবং ক্লান্তিকর ফিল্টারিং এবং ডেটা ফিউশন প্রক্রিয়া এড়ায়।
মন্তব্য:
কোয়ার্টেনশনস: কোয়ার্টরিয়ানগুলি সাধারণ সুপারকম্প্লেক্স সংখ্যা।জটিল সংখ্যাগুলি বাস্তব সংখ্যাগুলি এবং কল্পিত ইউনিট I এর সমন্বয়ে গঠিত, যেখানে আমি^2 = -1।
এমপিইউ -6050 কোথায় ব্যবহৃত হয়?
- খেলনা
- হ্যান্ডসেট এবং পোর্টেবল গেমিং
- গতি ভিত্তিক গেম কন্ট্রোলার
- ব্লারফ্রি ™ প্রযুক্তি (ভিডিও/স্থির চিত্র স্থিতিশীলতার জন্য)
- এয়ারসাইন ™ প্রযুক্তি (সুরক্ষা/প্রমাণীকরণের জন্য)
- তাত্ক্ষণিক ™ আইজি ™ অঙ্গভঙ্গি স্বীকৃতি
- স্বাস্থ্য, ফিটনেস এবং ক্রীড়া জন্য পরিধানযোগ্য সেন্সর
- গতি-সক্ষম গেম এবং অ্যাপ্লিকেশন ফ্রেমওয়ার্ক
- মোশনকম্যান্ড ™ প্রযুক্তি (অঙ্গভঙ্গি শর্ট-কাটগুলির জন্য)
- অবস্থান ভিত্তিক পরিষেবা, আগ্রহের পয়েন্ট এবং মৃত গণনা
- ইন্টারনেট সংযুক্ত ডিটিভিগুলির জন্য 3 ডি রিমোট কন্ট্রোল এবং শীর্ষ বাক্সগুলি সেট করুন, 3 ডি ইঁদুর
- স্পর্শকানি ™ প্রযুক্তি ("কোনও স্পর্শের জন্য" ইউআই অ্যাপ্লিকেশন নিয়ন্ত্রণ/নেভিগেশন)
এমপিইউ -6050 এর প্যাকেজ

কীভাবে এমপিইউ -6050 এর আওয়াজ হ্রাস করবেন?
আমরা এমপিইউ -6050 এর শব্দ কমাতে নিম্নলিখিত উপায়গুলি নিতে পারি।
ক্যালিব্রেটেড সেন্সর ব্যবহার করুন
এমপিইউ -6050 এর অ্যাক্সিলোমিটার এবং জাইরোস্কোপকে ক্যালিব্রেট করা সেন্সরগুলির পক্ষপাত এবং ত্রুটিগুলি নিজেরাই মুছে ফেলতে পারে, এইভাবে শব্দের প্রভাব হ্রাস করে।ক্রমাঙ্কন প্রক্রিয়াটি সাধারণত দুটি পর্যায় নিয়ে গঠিত: স্থির ক্রমাঙ্কন এবং গতি ক্রমাঙ্কন।
হার্ডওয়্যার ফিল্টারিং প্রক্রিয়া
এমপিইউ -6050 এর পাওয়ার লাইনে ফিল্টার ক্যাপাসিটার যুক্ত করা সেন্সরে বিদ্যুৎ সরবরাহের শব্দের প্রভাবকে হ্রাস করতে পারে।এদিকে, পিসিবি লেআউট চলাকালীন, আমাদের এমপিইউ -6050 কে উচ্চ-ফ্রিকোয়েন্সি সিগন্যাল লাইন এবং উচ্চ-শক্তি উপাদানগুলির মতো হস্তক্ষেপের সম্ভাব্য উত্স থেকে দূরে রাখার চেষ্টা করা উচিত।
সফ্টওয়্যার ফিল্টারিং প্রসেসিং
এমপিইউ -6050 থেকে কাঁচা ডেটা সংগ্রহ করার পরে, আমরা শব্দ-প্ররোচিত হস্তক্ষেপ দূর করতে প্রাথমিক ডেটা প্রাক-প্রক্রিয়াতে একটি সফ্টওয়্যার ফিল্টারিং লিঙ্ক যুক্ত করতে পারি।সাধারণত ব্যবহৃত সফ্টওয়্যার ফিল্টারিং পদ্ধতির মধ্যে গড় ফিল্টারিং, মিডিয়ান ফিল্টারিং, কালম্যান ফিল্টারিং এবং আরও অনেক কিছু অন্তর্ভুক্ত।
অভ্যন্তরীণ লো-পাস ফিল্টার ব্যবহার করুন
এমপিইউ -6050 এর একটি অভ্যন্তরীণ ইন্টিগ্রেটেড ডিজিটাল লো-পাস ফিল্টার রয়েছে, যা তার কাটঅফ ফ্রিকোয়েন্সি সেট করে উচ্চ-ফ্রিকোয়েন্সি শব্দ হ্রাস করতে ব্যবহার করা যেতে পারে।বিশেষত, আমরা এ/ডি স্যাম্পলিংয়ের ফলে সৃষ্ট উচ্চ-ফ্রিকোয়েন্সি শব্দটি দূর করতে এমপিইউ -6050 এর কনফিগারেশন রেজিস্টারটি সংশোধন করে ডিজিটাল ফিল্টারটির কাটঅফ ফ্রিকোয়েন্সি সেট করতে পারি।
এমপিইউ -6050-ভিত্তিক গতি ট্র্যাজেক্টোরি গণনা
এমপিইউ -6050 হ'ল একটি ছয় অক্ষের অ্যাক্সিলোমিটার এবং জাইরোস্কোপ সেন্সর যা অবজেক্টগুলির গতি এবং মনোভাব পরিমাপ করতে ব্যবহার করা যেতে পারে।এমপিইউ -6050 এর উপর ভিত্তি করে গতি ট্র্যাজেক্টোরি গণনা নিম্নলিখিত পদক্ষেপগুলি দ্বারা উপলব্ধি করা যেতে পারে:
প্রথম পদক্ষেপটি সেন্সর ডেটা পড়া।আমাদের উপযুক্ত ড্রাইভার এবং লাইব্রেরি ফাংশন ব্যবহার করে এমপিইউ -6050 সেন্সর থেকে অ্যাক্সিলোমিটার এবং জাইরোস্কোপ ডেটা পড়তে হবে।এই ডেটাগুলি সাধারণত একটি ডিজিটাল ফর্ম্যাটে আউটপুট হয়, তাই শারীরিক ইউনিটগুলিতে প্রকৃত পরিমাপে রূপান্তর করতে কিছু রূপান্তর এবং ক্রমাঙ্কন কাজের প্রয়োজন।
দ্বিতীয় পদক্ষেপটি ত্বরণ গণনা করা।প্রথমত, প্রতিটি অক্ষের অবজেক্টের ত্বরণটি অর্জন করতে আমাদের অ্যাক্সিলোমিটার থেকে ডেটা প্রক্রিয়া করতে হবে।পরবর্তীকালে, প্রতিটি অক্ষের মধ্যে বস্তুর বেগ এবং স্থানচ্যুতি গণনা করার জন্য, আমাদের ত্বরণের ডেটা সংহত করতে হবে।সংখ্যার সংহতকরণ কৌশলগুলি, যেমন ইউলারের পদ্ধতি বা ল্যাঙ্গার-কত্তা পদ্ধতি, প্রায়শই এই প্রক্রিয়াতে স্থানচ্যুতি গণনার যথার্থতা নিশ্চিত করতে ব্যবহৃত হয়।
তৃতীয় পদক্ষেপটি কৌণিক বেগ গণনা করা।জাইরোস্কোপ ডেটা ব্যবহার করে, প্রতিটি অক্ষের বস্তুর কৌণিক বেগ গণনা করা যায়।আবার, প্রকৃত শারীরিক ইউনিটগুলিতে কৌণিক বেগ পেতে এই ডেটা ক্রমাঙ্কিত এবং রূপান্তর করা দরকার।
চতুর্থ পদক্ষেপটি ঘূর্ণন গণনা করা।কৌণিক বেগের ডেটা সংহত করে, প্রতিটি অক্ষের মধ্যে বস্তুর ঘূর্ণনের কোণ গণনা করা যায়।এটি কোণটি গণনা করার জন্য ইউলারের পদ্ধতি বা দীর্ঘ-কুত্টা পদ্ধতি হিসাবে সংখ্যাসূচক সংহতকরণ কৌশল ব্যবহার করে করা যেতে পারে।
পঞ্চম পদক্ষেপটি ডেটা মার্জ করা।আমরা অবজেক্টের সম্পূর্ণ মনোভাব এবং অবস্থানের তথ্য পেতে অ্যাক্সিলোমিটার এবং জাইরোস্কোপগুলি থেকে ডেটা একত্রিত করি।কোয়ার্টনিয়ন-ভিত্তিক মনোভাব সলভার বা ইউলার এঙ্গেল সলভার হিসাবে অ্যালগরিদম ব্যবহার করে এটি করা যেতে পারে।
ষষ্ঠ পদক্ষেপটি ফলাফলগুলি কল্পনা করা।আমরা গণিত অবজেক্ট মোশন ট্র্যাজেক্টোরিকে একটি 3 ডি সমন্বয় সিস্টেমে পয়েন্টগুলির একটি সেটে রূপান্তর করি এবং অবজেক্টের গতি ট্র্যাজেক্টোরি এবং মনোভাব পরিবর্তনের আরও স্বজ্ঞাত বোঝার জন্য উপযুক্ত ভিজ্যুয়ালাইজেশন সরঞ্জামগুলি ব্যবহার করে এটি প্রদর্শন করি।
প্রায়শই জিজ্ঞাসিত প্রশ্ন [FAQ]
1. এমপিইউ 6050 কতটা সঠিক?
অর্জিত ফলাফলগুলি লিফট শ্যাফ্টের যথাযথ মাত্রা এবং লিফট শিল্পের উচ্চমানের সঠিক মাত্রার আশ্বাস দিয়ে 1 % এরও কম এবং নির্ভরযোগ্যতার পর্যাপ্ত নির্ভুলতা দেখিয়েছে।
2. এমপিইউ 6050 থেকে ডেটা কীভাবে পড়বেন?
অভ্যন্তরীণ এমপিইউ 6050 রেজিস্টারগুলি পড়তে, মাস্টার একটি সূচনা শর্ত প্রেরণ করে, তারপরে আই 2 সি স্লেভ ঠিকানা এবং একটি লেখার বিট এবং তারপরে নিবন্ধের ঠিকানা যা পড়তে চলেছে।
৩. এমপিইউ 6050 কোথায় ব্যবহৃত হয়?
পরিধানযোগ্য স্বাস্থ্য-ট্র্যাকিং, ফিটনেস-ট্র্যাকিং ডিভাইসগুলিতে।ড্রোন এবং কোয়াডকপ্টারগুলিতে, এমপিইউ 6050 অবস্থান নিয়ন্ত্রণের জন্য ব্যবহৃত হয়।রোবোটিক বাহু নিয়ন্ত্রণে ব্যবহৃত।হাতের অঙ্গভঙ্গি নিয়ন্ত্রণ ডিভাইস।
4. এমপিইউ 6050 একটি আইএমইউ?
এমপিইউ 6050 আইএমইউ সেন্সর ব্লকটি এমপিইউ -6050 সেন্সর থেকে ডেটা পড়েছে যা হার্ডওয়্যারের সাথে সংযুক্ত রয়েছে।ব্লকটি সেন্সরের অক্ষের সাথে ত্বরণ, কৌণিক হার এবং তাপমাত্রা আউটপুট দেয়।
৫. এমপিইউ 6050 এর প্রক্রিয়াজাতকরণ কী?
এটি এমপিইউ 6050 এর অনবোর্ড প্রসেসর যা অ্যাক্সিলোমিটার এবং জাইরোস্কোপ থেকে আগত ডেটাগুলিকে একত্রিত করে।ডিএমপি এমপিইউ 6050 ব্যবহারের মূল চাবিকাঠি এবং পরে বিশদভাবে ব্যাখ্যা করা হয়।সমস্ত মাইক্রোপ্রসেসরের মতো ডিএমপির চালানোর জন্য ফার্মওয়্যার প্রয়োজন।
ফাংশন পরীক্ষা।সর্বোচ্চ ব্যয়বহুল পণ্য এবং সর্বোত্তম পরিষেবা হ'ল আমাদের চিরন্তন প্রতিশ্রুতি।
গরম নিবন্ধ
- CR2032 এবং CR2016 বিনিময়যোগ্য
- মোসফেট: সংজ্ঞা, কাজের নীতি এবং নির্বাচন
- রিলে ইনস্টলেশন এবং পরীক্ষা, রিলে ওয়্যারিং ডায়াগ্রামগুলির ব্যাখ্যা
- CR2016 বনাম CR2032 পার্থক্য কী
- এনপিএন বনাম পিএনপি: পার্থক্য কী?
- ESP32 বনাম এসটিএম 32: কোন মাইক্রোকন্ট্রোলার আপনার জন্য ভাল?
- LM358 দ্বৈত অপারেশনাল পরিবর্ধক বিস্তৃত গাইড: পিনআউটস, সার্কিট ডায়াগ্রাম, সমতুল্য, দরকারী উদাহরণ
- CR2032 বনাম ডিএল 2032 বনাম সিআর 2025 তুলনা গাইড
- পার্থক্যগুলি বোঝা ESP32 এবং ESP32-S3 প্রযুক্তিগত এবং কর্মক্ষমতা বিশ্লেষণ
- আরসি সিরিজ সার্কিটের বিশদ বিশ্লেষণ
 NRF24L01 যোগাযোগ চিপের ক্ষমতা এবং অ্যাপ্লিকেশনগুলি অন্বেষণ করছে
NRF24L01 যোগাযোগ চিপের ক্ষমতা এবং অ্যাপ্লিকেশনগুলি অন্বেষণ করছে
2024-04-25
 এমএমবিটি 3904 এনপিএন ট্রানজিস্টর: এর স্পেসিফিকেশন, বিস্তৃত অ্যাপ্লিকেশন গাইড এবং এমএমবিটি 3904 বনাম এমএমবিটি 55551
এমএমবিটি 3904 এনপিএন ট্রানজিস্টর: এর স্পেসিফিকেশন, বিস্তৃত অ্যাপ্লিকেশন গাইড এবং এমএমবিটি 3904 বনাম এমএমবিটি 55551
2024-04-25
গরম অংশ নম্বর
 C1608NP02A101J080AA
C1608NP02A101J080AA LLA185C70G104MA01L
LLA185C70G104MA01L CC0805KRX7R0BB332
CC0805KRX7R0BB332 C1005X5R0J106M050BC
C1005X5R0J106M050BC GRM0335C1H9R6DA01D
GRM0335C1H9R6DA01D- GRM0335C1H680GA01J
 GCM2165G1H392JA16D
GCM2165G1H392JA16D 08055AVZQFAT2A
08055AVZQFAT2A 1812CC472KAT3A
1812CC472KAT3A GRM1556S1H7R2CZ01D
GRM1556S1H7R2CZ01D
- SMCJ150A-13-F
- MT48LC8M16A2P-6A:L TR
- RNA51953BFP#H0
- V24C24T100AN
- V300A48C600A
- AK4141EQ
- T491C476K010ZTPV10
- LT8330EDDB#TRMPBF
- DM74ALS151M
- LP2954IM/NOPB
- OPA3875IDBQR
- TSB14AA1APFB
- DAC8408FPC
- LT1764AMPQ#PBF
- T491B475K010AT7111
- T491B106K006AT4539
- SN65LBC176QDRQ1
- AFEDRI8201PFB
- DCP010505p-u
- EPF10K70RI240-4N
- EVM3ESX50BS3
- IDT82V2604BBG
- ISPLSI2032E-110LT48
- ISPLSI2032V-100LJ44
- R5F56216BDLD
- SC667163CPBE
- SP385EET
- SST29LE010-150-4I-NH
- STIH315-YFA
- TL074CDBR
- UPD75108GF-Y08-3BE
- TF-331-ACL
- DE5603BA11GLC
- XC4013XL-PQ208CFN
- VT3205B41/TMJ828E
- BCM7563TPKFEBA03G
- CF72258APCM
- H5MS5162DFR-J3M-C
- RC1206JR-07200KRL